Synopsis:
Since we have to build a few more, we have decided to share with anyone who
wishes to follow, to build a fully loaded quadcopter drone with GPS,
Autopilot and Waypoints. Another
Build A Drone project, this time open
to RCGroups to follow weekly! We will try our best to video log everything
and will answer questions related to the choice of equipments we use on this
build only, to stay on topic. Anyone
can also of course offer their support, but please be polite and respectful to everyone.
Maybe at the end, we will try to put all the videos into one.
Schedule: GO HERE=>
RCGroups to participate.
Signup at RCGroups. Duration: 2
months from shopping all the parts to maiden flight Complete
Video Logs:
Playlist
Features and Specification for this build:
-
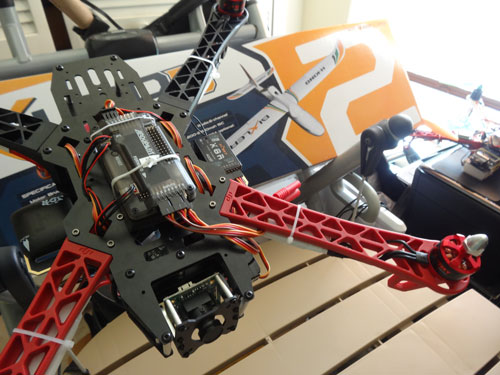
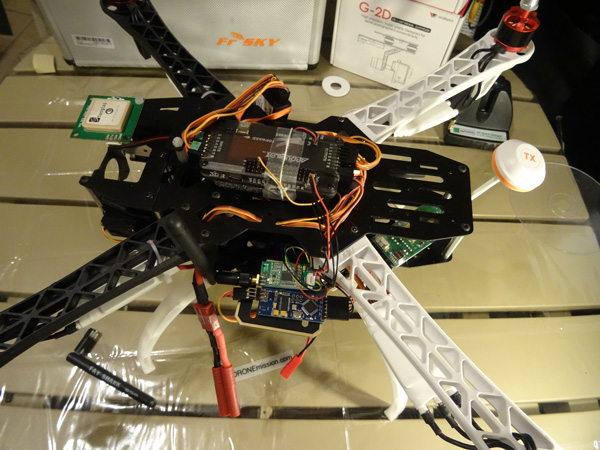
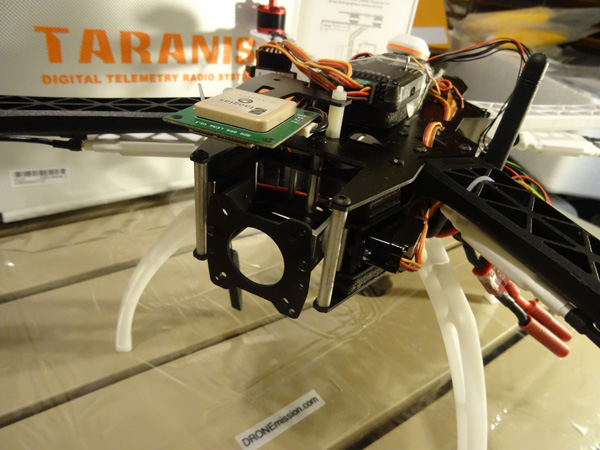
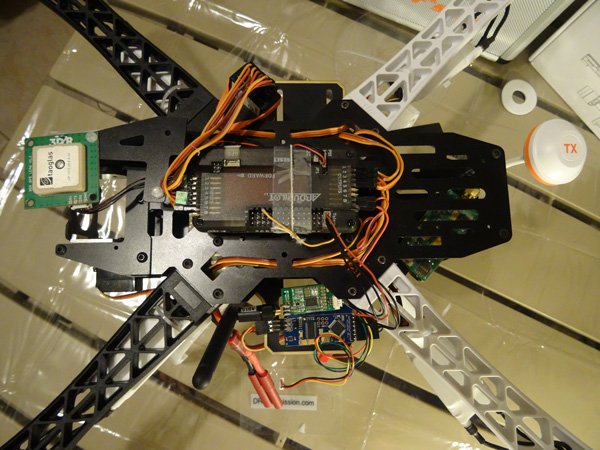
Electronics and Motors: DJI F450 flame wheel kit
-
Flight Controller: APM 2.5 or 2.6. - Will feature APM gimbal 1 axis controller
on a modified DJI Frame - Will include FPV System, video transmitter and a
small camera/DVR (not using Sony Effio) - MinimOSD
On Screen Display - The power
distribution will be hidden in the lowest deck to organize and reduce
interference - Nicknamed "DM Apache" for the sidewinder bays for accessories - The legs uses
the standard DJI design, which makes it easily replaceable, cost efficient and
very strong. - The configuration passed the compassmot test below the minimum interference using APM
2.6 - Configure Talking Taranis Radio Transmitter
Start with your Parts Shopping List:
Parts
Est. Cost
Alternate
Description
Where to Buy
Flight Controller
US$159.99
$89.99
3DR APM 2.5 or 2.6 onboard computer or Arduflyer
3DR or RcTimer
GPS & Compass
US$79.99
$39.99
3DR uBlox GPS with external compass or u-Blox CN06 Plus
FrSky 2.4GHz ACCST Taranis X9D Transmitter.
Verbally speaks the distance, voltage, airspeed, altitude etc. Our
alternate is to get a Turnigy 9X or Devo 10
GO HERE=>
RCGroups to view BUILD Videos What to expect from this build:
Radio: Taranis X9D
Full Telemetry RSSI alarms (warns you of signal reception
problems before disaster can strike)
Self test of the transmitter antenna
16 channels (more when combined with external module)
60 model memories
64 mixers, 9 flight modes
16 custom curves with 3-17 points each, 32 logic switches
Voice or custom sound alerts
USB and SD card slot for system expansion
Long range system capable of up to 3 times the range of current 2.4 systems
Quad bearing gimbals that are silky smooth
State-of-the-art open source software
Super low latency for ultra quick response (9ms)
Large 212 X 64 backlit LCD screen
Real-time data logging
Receiver lock (program locked to aircraft - limited to FrSky receivers
running PXX protocol)
JR Style module bay for additional RF modules and so much more
Selectable flight mode (1, 2, 3, or 4)
2 timers, count up or down, throttle %, talking, etc.
Trims - Adjustable from course to extra fine with extended and exponential
trims
Standard trainer jack
ARM Cortex M3 32-bit 60MHz
Integrates with CompanionTX – a FREE computer program that is a transmitter
setup buddy. CompanionTX (Windows/Mac/Linux) is used to set-up models with the
wizard, save, edit and share your models and settings as well as simulate your
transmitter or model setup.
USB connection for firmware upgrades, sound editing, R/W to the microSD card
and integrate with CompanionTX
Sticks and pots can be calibrated by the end user
Multiple language support (Radio arrives configured for English language)
Fixed
ID: Assign fixed id in order to setup transmitter failsafe no pulse.
To set a fixed id [BIND] to a X8R, turn on the Taranis transmitter, go to page
2, scroll down, click on the [BIND] button, you should hear the beeps. Hold the
F/S button on the X8R, receiver, power up the receiver (if connected to APM,
just connect your USB). Release the F/S button, the red led will flash,
indicating the binding process is completed. Power of Transmitter and Receiver.
Test your failsafe following our video Episode 26. If you fail to
re-establish connection to your receiver after failsafe, turn off and then turn
on the transmitter first, followed by the receiver, go to page 2 click on
the [BIND], and repeat the failsafe test.
The Mission Planner Wizard did not set the X frame correctly (symptoms wobbles
4 corners and flips over at take-off), i.e. APM facing the wrong direction of
frame, it is best to not use the wizard, but instead go through the mandatory
hardware setup.
The default Eelevator (Pitch) stick is reverse, go to 'INV' on the servos page
for that channel 2/model.
Depending on your weight of your lipo and which propeller size you use, you may
find your quadcopter slightly overpowered or underpowered copter the throttle
required to keep the vehicle in a stable hover may be under 40% or over 60%.
Although this is fine while flying purely stabilize mode it can lead to a rough
transition to autopilot modes (Alt Hold, Loiter) where having the throttle
outside of the 40% ~ 60% deadzone will be interpreted as meaning you want the
copter to climb or descend. Open the Mission Planner’s Software > Standard
Params screen and update the Throttle Mid Position (THR_MID) to the value
estimated (example (690). Complete steps here: http://copter.ardupilot.com/wiki/ac_throttlemid/
DJI ESC: To reduce noise, DJI opted not to include Battery Eliminator Circuit (BEC) supply
of 5v out from the ESC, as such an external UBEC
is required. Found a light 7g UBEC, [Coupon
BUY Info]
that can power the receiver and 3 additional servos for gimbal
Lipo battery 3s 4000 mAh: Wait 5 minutes before adding to the cart,
you get a pop-up $3 discount [BUY Info US$23.37]

 Synopsis:
Since we have to build a few more, we have decided to share with anyone who
wishes to follow, to build a fully loaded quadcopter drone with GPS,
Autopilot and Waypoints. Another
Build A Drone project, this time open
to RCGroups to follow weekly! We will try our best to video log everything
and will answer questions related to the choice of equipments we use on this
build only, to stay on topic. Anyone
can also of course offer their support, but please be polite and respectful to everyone.
Maybe at the end, we will try to put all the videos into one.
Synopsis:
Since we have to build a few more, we have decided to share with anyone who
wishes to follow, to build a fully loaded quadcopter drone with GPS,
Autopilot and Waypoints. Another
Build A Drone project, this time open
to RCGroups to follow weekly! We will try our best to video log everything
and will answer questions related to the choice of equipments we use on this
build only, to stay on topic. Anyone
can also of course offer their support, but please be polite and respectful to everyone.
Maybe at the end, we will try to put all the videos into one.